1. 벡터의 외적(cross product)
내적에서 끄는 힘, 미는힘에 대해 알아보았다면 외적에서는 회전하는 힘 즉, 돌림힘(Torque)에 대해 알아보자
1) 외적(cross product)의 배경
고대 인류는 물체를 회전시키는 힘이 얼마나 효과적으로 전달되는지를 알고 싶어 했다.
단순히 물체를 밀거나 당기는 것이 아니라, 특정 지점에서 힘을 가하면 어떻게 회전이 발생하는지를 알고싶어 했다.
e.g. 수레바퀴를 돌릴 때
바퀴의 중심을 직접 밀어도 회전이 안 되지만, 가장자리를 밀면 쉽게 회전하고, 같은 힘이라도 어디에 적용하는지에 따라 회전 효과가 다르다.
2) 외적(cross product)의 의미
회전하는 힘(Torque)을 설명하기 위해 힘이 얼마나 회전을 유발하는지 측정하기 위함이다.
즉, 힘이 물체를 밀 때, 그 힘이 어느 방향으로 얼마나 회전시키는가를 의미한다.
따라서, 두 벡터가 만들어내는 회전 효과를 측정하는 데 사용된다.
전자기학에서의 예 : 로렌츠 힘 (Lorentz Force) - 자기장에서의 전하 운동
자기장 B 안에서 속도 v를 가진 전하 q가 움직일 때, 전하는 나선형 궤도로 회전하며 받는 힘을 의미
3) 외적(cross product)의 정의
정의 : 두 벡터에 대한 곱의 결과가 vector 이다.
표현 : 곱의 기호로 \( \times \)를 사용하여 cross product로 표현한다.
외적의 결과는 vector이므로 크기와 방향 모두 고려해야한다.
1) 대수적 정의(Matrix)
2) 기하학적 정의
벡터의 크기
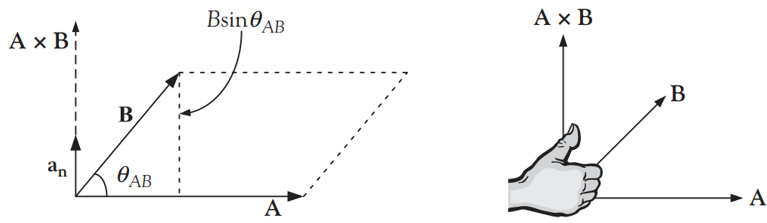
벡터 \( \mathbf{A} \)와 \( \mathbf{B} \)에 대한 외적의 크기는 두 벡터가 만드는 평행사변형의 면적과 같다.
평행사변형의 넓이는 밑변a와 높이h의 곱으로 \( S=ah \) 와 같이 표현 된다.
두 벡터가 만드는 평행사변형에서 밑변 \( a = \left | \mathbf{A}\right |\) 와 같고,
두 벡터가 만드는 평행사변형에서 높이는 \( h = \left | \mathbf{B}\right |\sin \theta \) 와 같다.
따라서 벡터 \( \mathbf{A} \)와 \( \mathbf{B} \)에 대한 외적의 크기는 다음과 같이 표현된다.
\( \left | \mathbf{A}\times\mathbf{B}\right |=\left | \mathbf{A}\right |\left | \mathbf{B}\right |\sin \theta \)
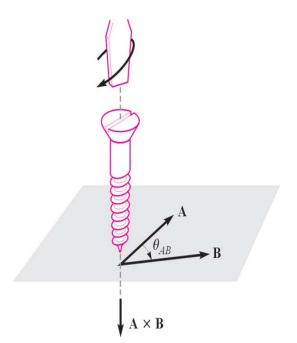
벡터의 방향
벡터 A와 B에 대한 외적의 방향은 오른손 법칙을 따른다. 즉, 두 벡터로 이루어진 평면에 수진인 방향으로 표현된다.
벡터 A와 B에 대한 외적의 방향 : \( \mathbf{a_N} \) 여기서 N은 normal, 수직이라는 의미
외적은 다음과 같이 정의된다.

\( \mathbf{A} \times \mathbf{B} = \mathbf{a_N} \left | \mathbf{A}\right |\left | \mathbf{B}\right |\sin \theta \)
3) 정리
정의를 정리하면 다음과 같다.
4) 외적(cross product)의 특징
1) 대수적 특징

외적의 대수적 특징을 보면 그림4와 같이 순서에 따라 부호가 달라지므로 교환법칙이 성립하지 않는 것을 볼 수 있다.
분배법칙은 성립하므로 다음과 같은 대수적 특성을 표현할 수 있다.
\( \mathbf{A} \times \mathbf{B} \neq \mathbf{B} \times \mathbf{A} \)
\( \mathbf{A} \times \mathbf{B} = -(\mathbf{B} \times \mathbf{A}) \)
\( \mathbf{A} \times (\mathbf{B}+ \mathbf{C}) = \mathbf{A} \times \mathbf{B} + \mathbf{A} \times \mathbf{C} \)
2) 단위벡터의 외적 관계
벡터의 외적(cross product)의 식에 \( \sin \theta \)가 있다는 점을 생각해보면 의 특성상 각도가 0°에서 0, 90°에서 1임을 알 수 있다.
따라서 좌표계에서 단위벡터 사이각이 모두 90°인 점과 외적의 순서를 이용해서 다음과 같은 외적 관계를 알 수 있다.
'Engineering Electromagnetism > 1. Vector Analysis' 카테고리의 다른 글
| Chapter 1-7 원통 좌표계(Circular Coordinate System) (0) | 2025.02.20 |
|---|---|
| Chapter 1-6 직각 좌표계(Rectangular Coordinate System) (0) | 2025.02.20 |
| Chapter 1-4 벡터의 내적(dot product) (0) | 2025.02.20 |
| Chapter 1-3 벡터 성분과 단위벡터 (0) | 2025.02.20 |
| Chapter 1-2 벡터 대수 (0) | 2025.02.20 |



